手工组装好的四驱小车,自动沿着黑色路径寻走;当发现竖线时停止,发现曲线时自动转弯寻找路径;还是蛮有意思,可以试试看。


ps2摇杆控制可视化小车(一)
前段时间实验了ps2摇杆控制多舵机实验;今天尝试将ps2摇杆数据转换为四驱小车的方向控制。实验将分两部分,第一部分将叙述整个流程的概要;第二部分将具体去实现。
其中用到的知识点: 1、四驱小车驱动封装参考:https://www.shumeijiang.com/2021/09/23/四驱小车循迹实验-直流电机驱动封装; 2、PCF8591数模转换参考:https://www.shumeijiang.com/2022/10/30/pcf8591-da数模转换实验.html; 3、树莓派间socket通信参考:https://www.shumeijiang.com/2021/10/18/树莓派间通信-socket通信.html; 4、ps2摇杆数据获取参考:https://www.shumeijiang.com/2022/12/07/ps2摇杆传感器实验.html; 5、摄像头数据流参考:https://www.shumeijiang.com/2021/11/14/树莓派摄像头实验(一).html。
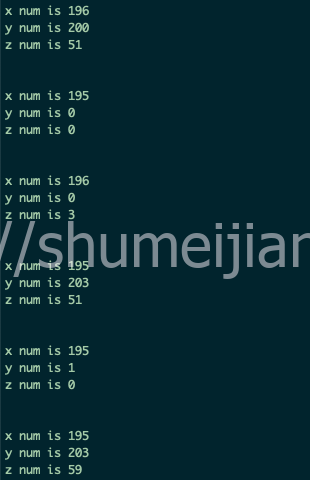
实验思路: 1、用到两个树莓派,一个树莓派负责获取摇杆数据;另一个树莓派负责接收指令然后驱动小车行驶; 2、第一个树莓派获取到摇杆数据后,将数据发送给PCF8591数模转换板,转换为数字信号;3、第一个树莓派然将数字信号转换为对应的方向控制,然后通过socket通信将命令发给第二个树莓派; 4、负责执行的树莓派,接收到通信数据后,驱动小车执行对应的命令。
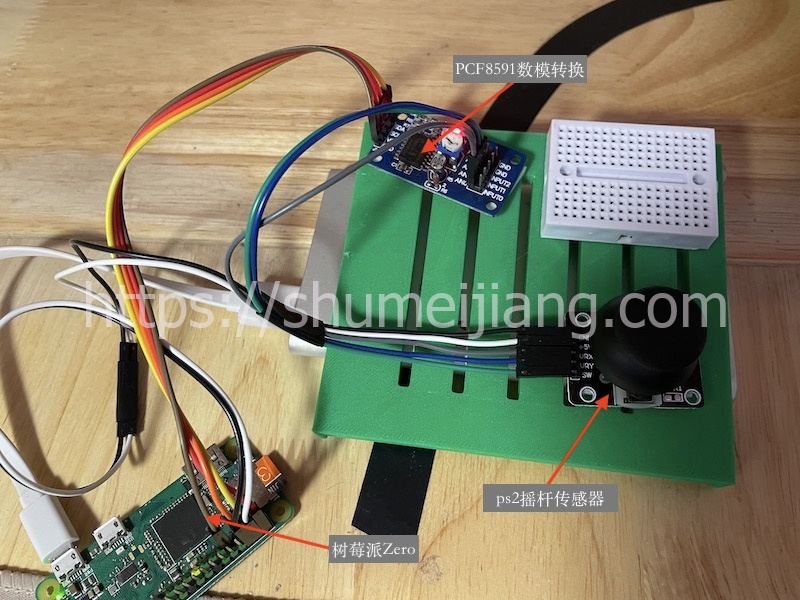
组装示例:

第二篇文章将具体实现如何控制小车行驶起来。