#实验目的:通过控制超声波传感器(HC-SR04)不断发送超声波,然后利用超声波遇物体检反射的特性,检测接收超声波的反馈时间,从而计算出前方物体的实时距离。
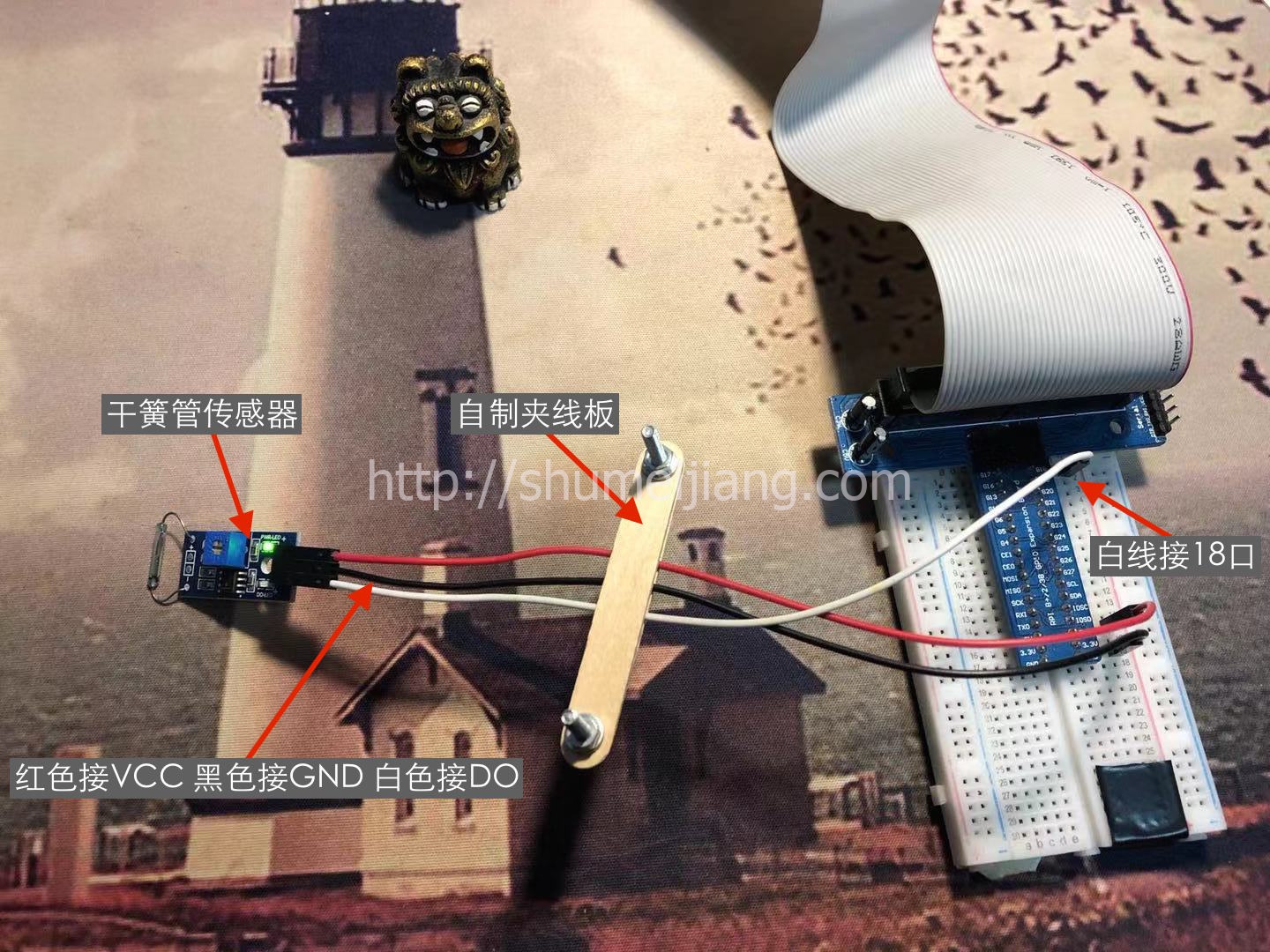
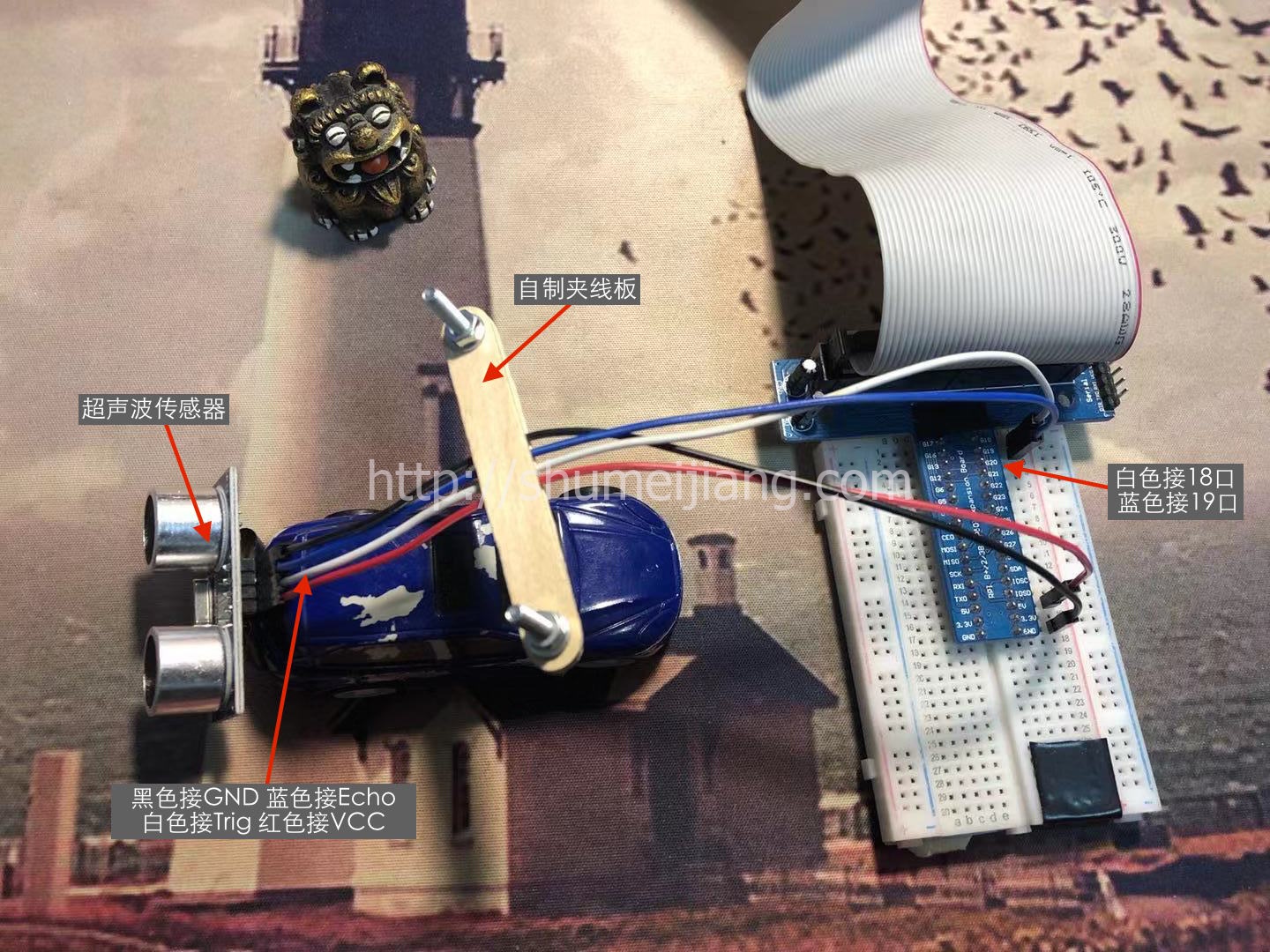
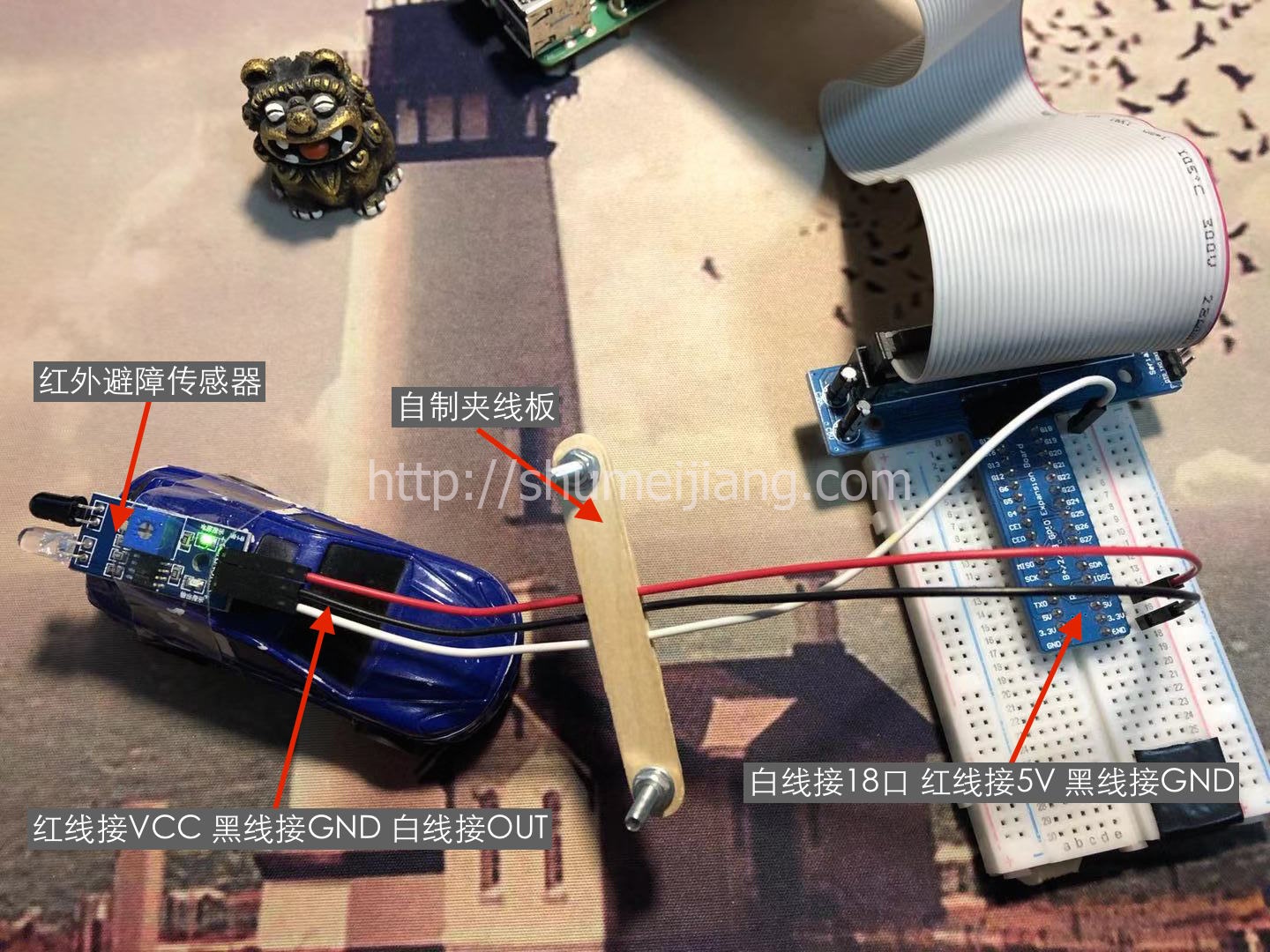
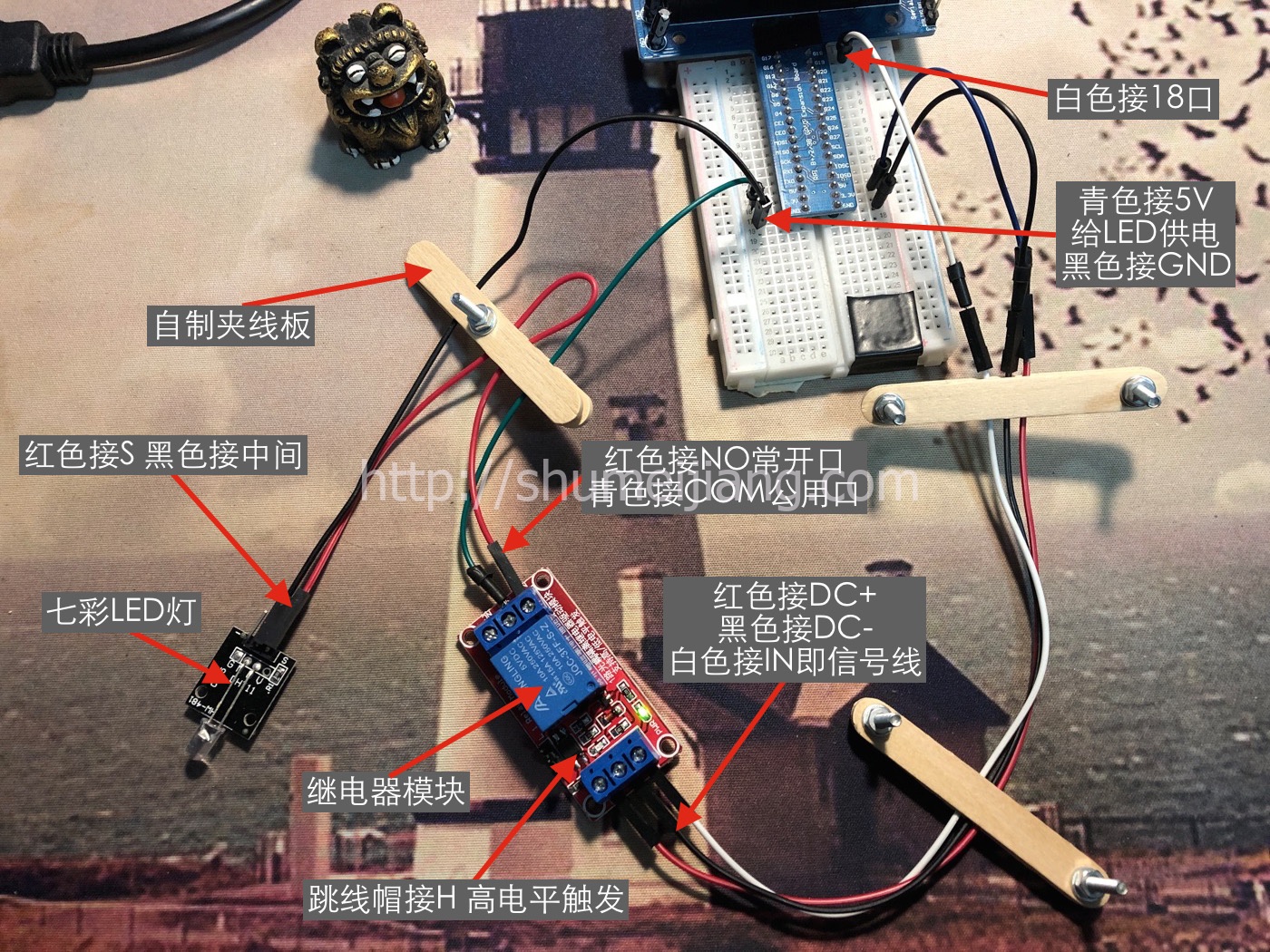
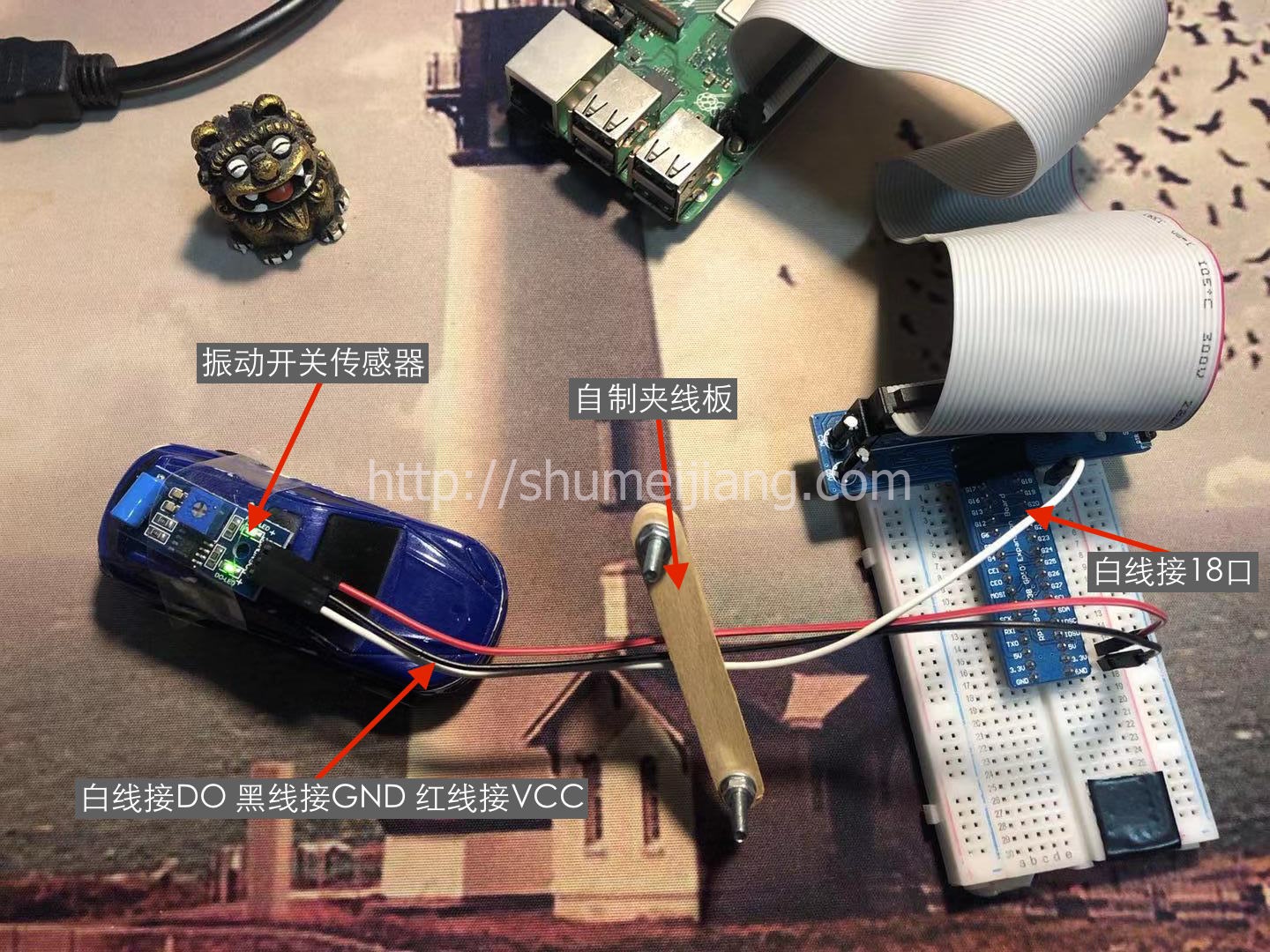
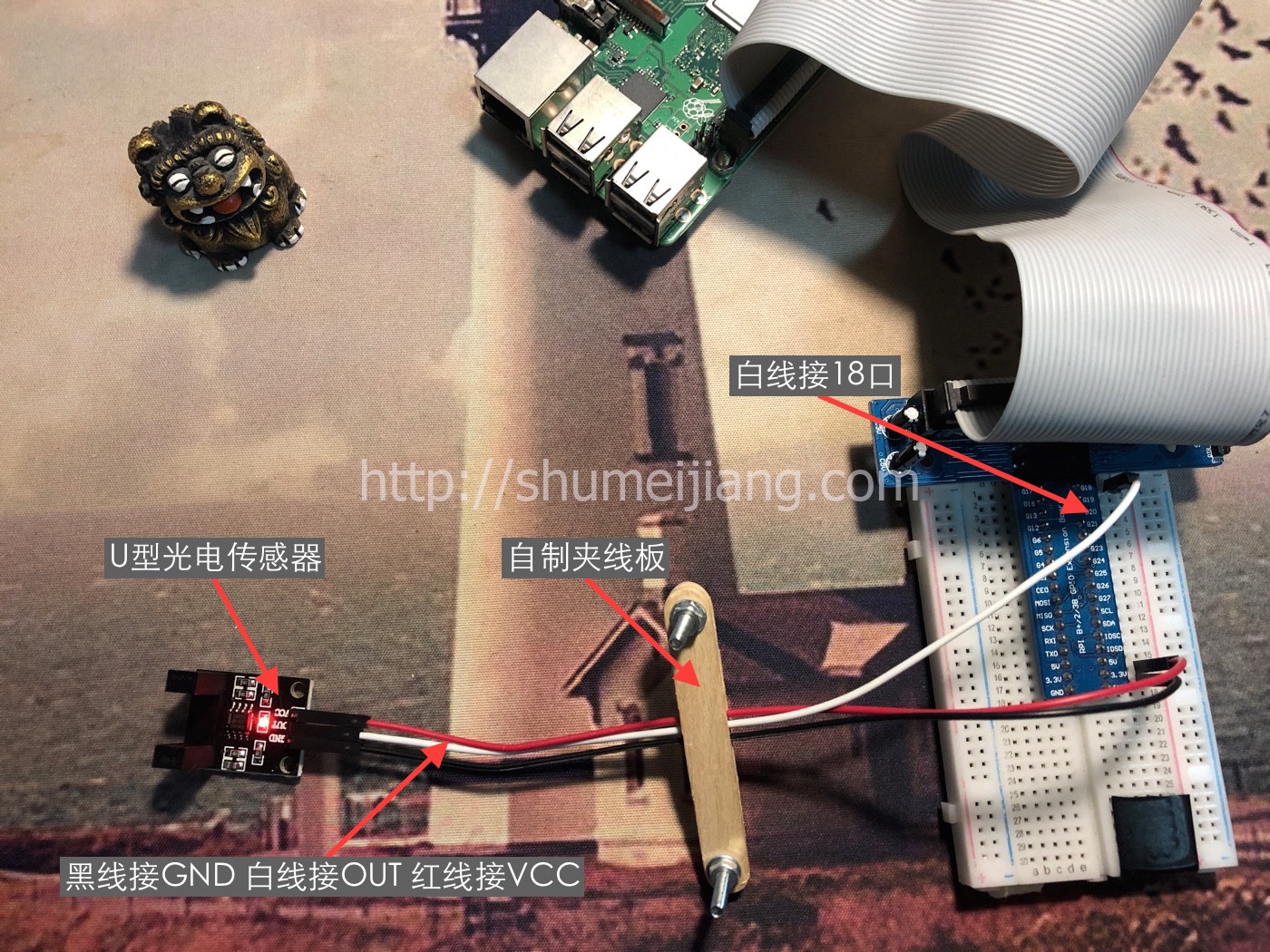
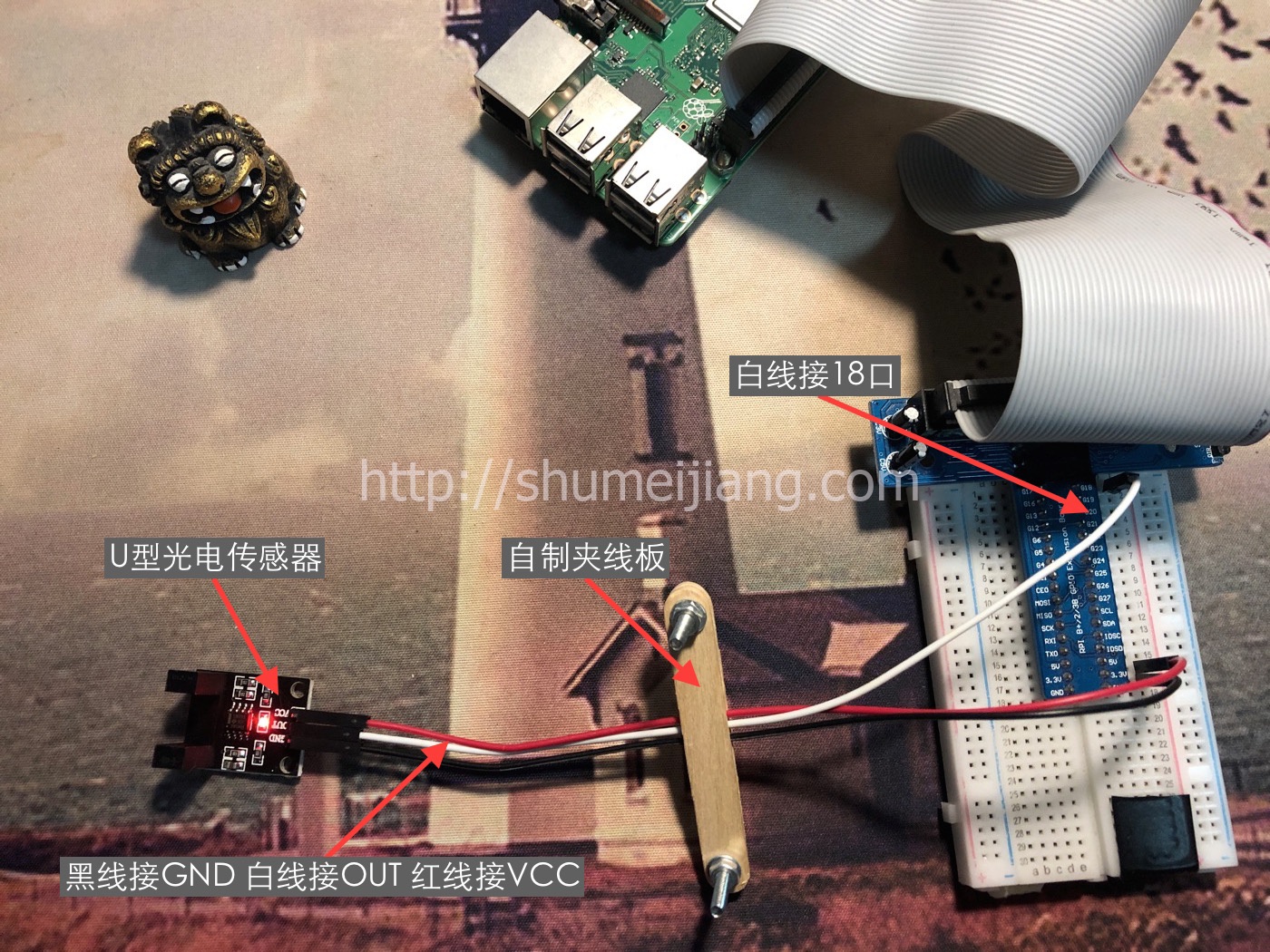
#接线效果如图:
接线示例 注:
1、发送超声波需要至少10微妙的高电平;
2、Trig发送声波时,会同时把Echo置为高电平;但是两者之间有微小的时间差;此时记录开始时间,当声波遇到物体回传被Echo接收到后,Echo会被置为低电平;因此检测Echo的由高电平到低电平的时间即可计算传输时间;
3、将得到的时间/2,即可得到单次距离所用的时间;然后乘以声音的速度(340m/s),即可得到距离。
#实验代码
实验代码
#!/usr/bin/env python
#实验过程
1、准备一把尺子作为校验物;
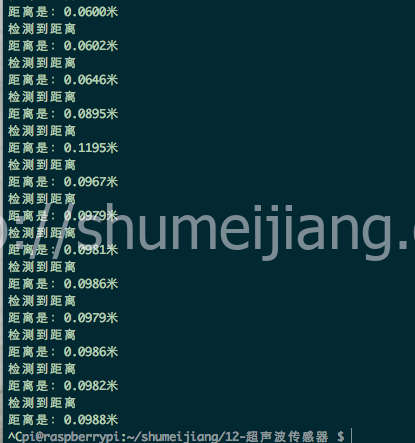
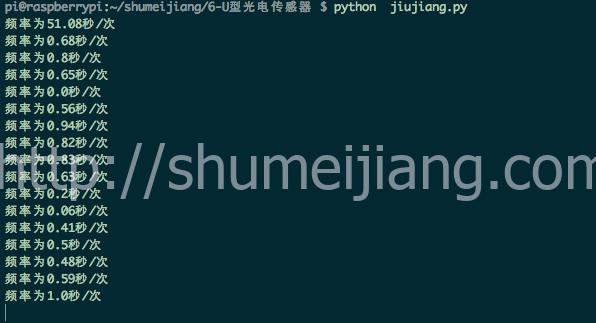
2、通过移动障碍物,会看到屏幕显示距离的动态变化;
检测结果 #视频效果如下: