四驱小车驱动实验(一)
#实验目的:通过组合四个直流电机和两个电机驱动板以及编写控制代码,实现不同的直流电机集体协作,从而实现预期动作的效果;本篇文章主要实现四个电机的协同前进和后退动作。
#接线效果如图:
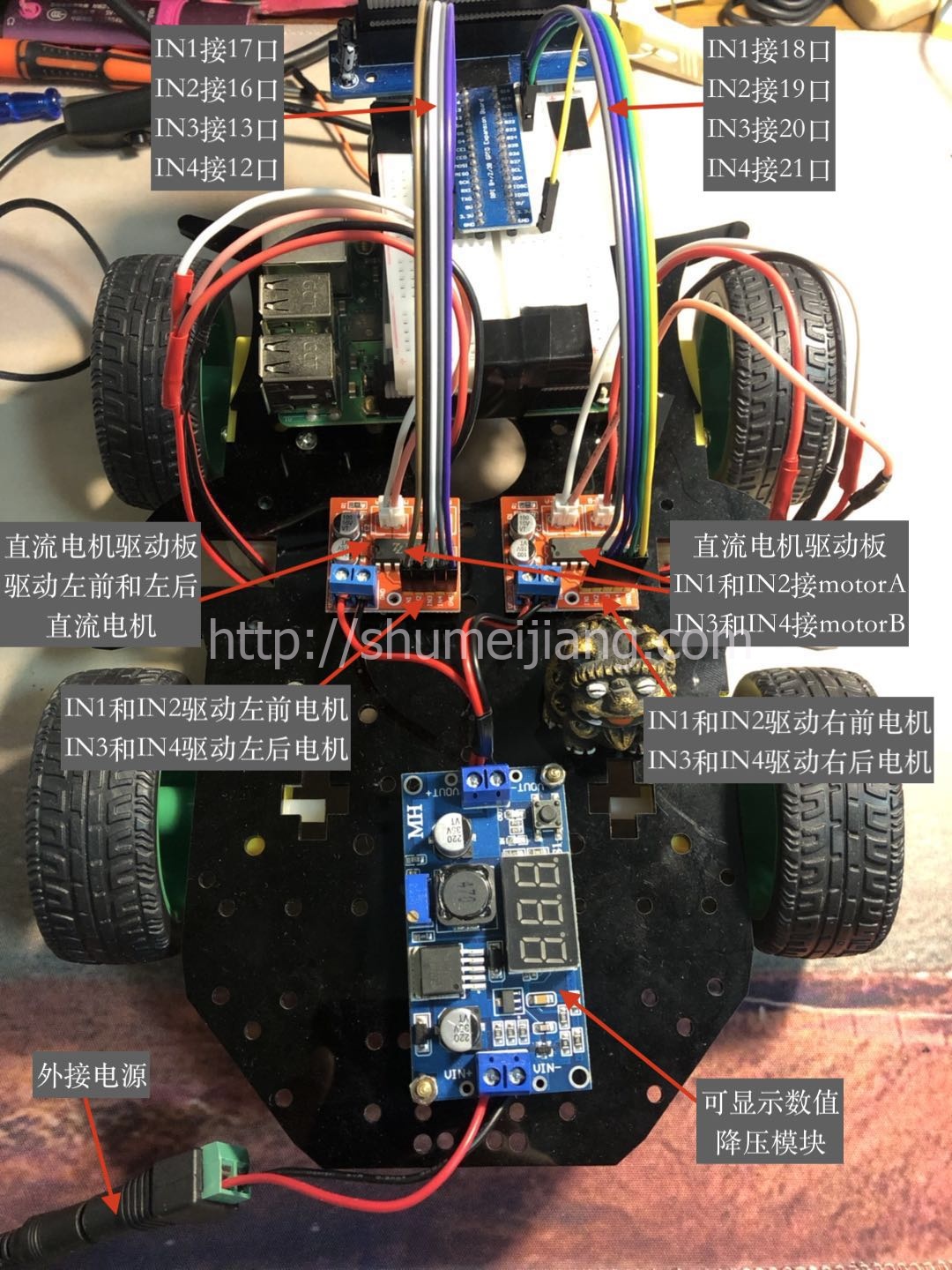
#注解:实验通过一个可显示电压的降压模块,以及两个直流电机驱动板,驱动四个直流电机进行动作的执行。 其中驱动原理可参考文章:http://www.shumeijiang.com/2020/05/04/直流电机驱动变速实验/
#关键代码:
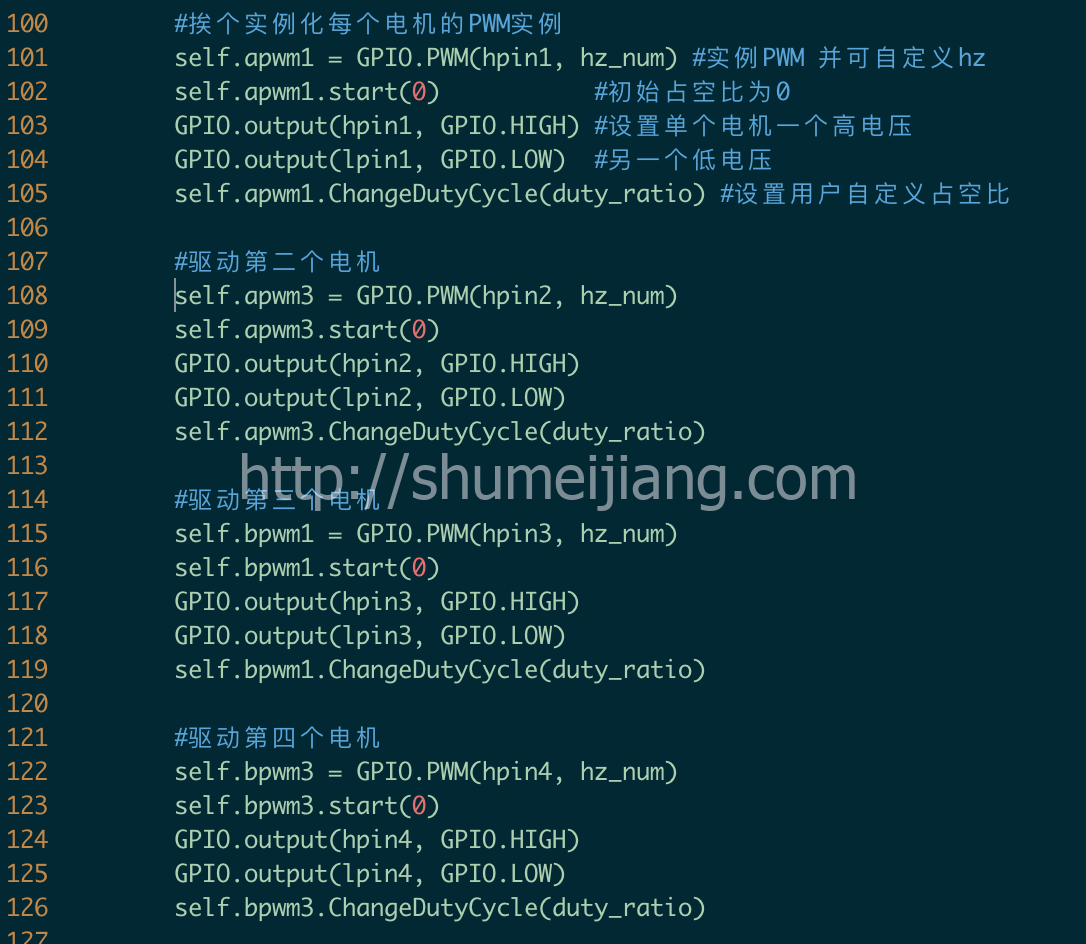
#如上图代码可见: 1、每个电机都需要单独实例化PWM,使用PWM的原因是我们希望通过改变占空比从而实现调节电机的转速效果。 2、其中每个电机的高低电平设置引脚都为可变变量,我们只需要通过不同的赋值,即可实现电机的前转和后转效果。 3、前进和后退赋值见下图;

#执行时间设置和动作停止:
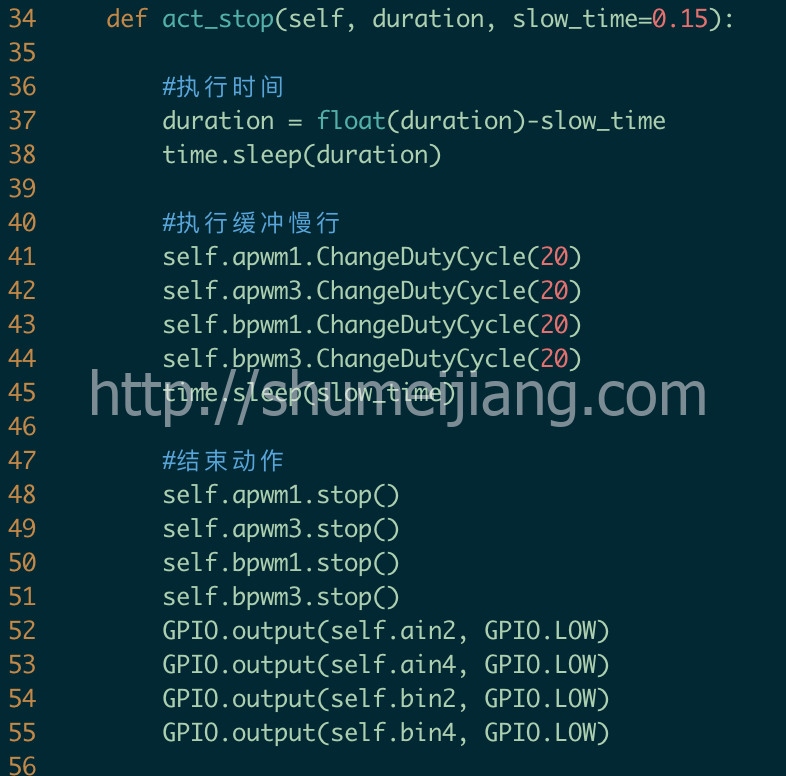
#如上图可见: 1、用户可指定前进或后退的执行时间,见代码time.sleep(duration) 2、其中执行时间内,可执行缓冲时间,即在执行时间的最后一段时间,降低占空比,从而实现缓慢停止的效果;当然也可以不加,执行也没有问题。
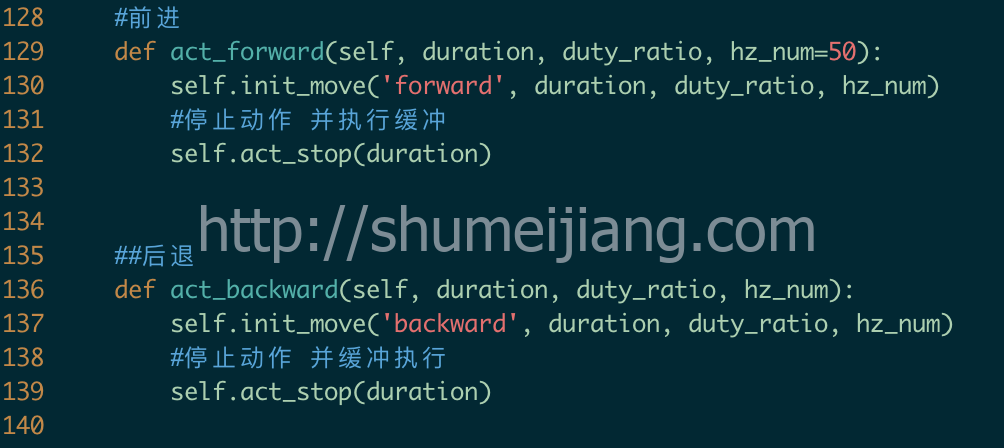
#封装前进和后退动作以及调用示例:
#驱动类可发送邮件至lee.chuke@foxmai.com获取;
#视频效果如下: