前两篇文章已经介绍了如何组装四驱小车以及小车的驱动类封装;接下来这篇文章将尝试驱动类调用以及小车循迹测试。�
小车组装文章:https://www.shumeijiang.com/2021/09/23/四驱小车循迹实验-小车组装/ https://www.shumeijiang.com/2021/09/23/四驱小车循迹实验-直流电机驱动封装/
#循迹实验效果
#实现效果:
从上面gif图以及视频可看到,小车遇到直线会直行前进,由于手工贴的胶带不是很直所以小车会实时调整前进的角度;当遇到转弯时,同样会一点点进行转弯直到寻找到黑线线条;
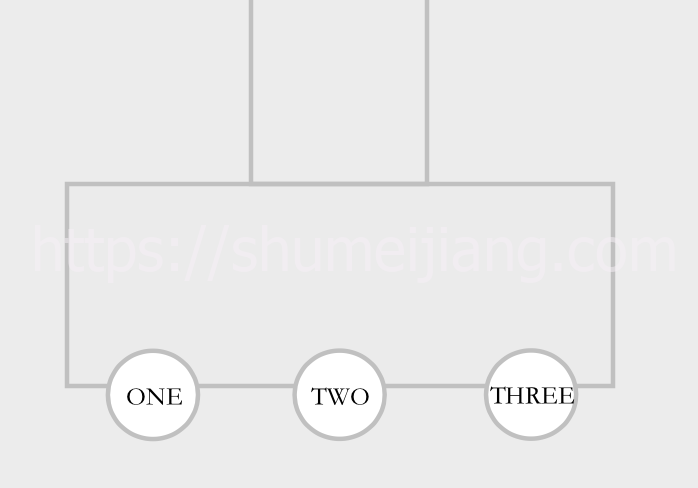
传感器示例 上图模拟小车前面并排的三个红外避障传感器,分别是ONE,TWO,THREEE;默认黑线位于TWO传感器正下方为直行;由于小车要不停向前移动,但是黑线有弯曲或者转弯的情况,所以小车会出现三个传感器分别接触黑线的情况;通过不同的传感器被触发事件,从而得出小车现在的行走方向以及判断是否要做方向调整,具体原理如下(1为检测到黑线触发事件,0为未检测到黑线):
1、ONE=1,THREE=0 说明黑线偏转右侧,此时小车应向右转向;
2、ONE=0,THREE=1 说明黑线偏转左侧,此时小车应向左转向;
3、ONE=0,TWO=1,THREE=0 说明黑线在中心方向,小车需直行;
4、ONE=1,TWO=1,THREE=1 说明遇到横线,小车需停顿;
5、ONE=0,TWO=0,THREE=0 说明小车失去黑线,此时需寻找或者停止。
#实现代码
#!/usr/bin/env python
从上面的代码可以看到循迹的策略和流程如下:
1、首先注册one和three分别一个RISING(低变高)事件,因为默认情况下这两个传感器没有遇到黑线而是地板,所以触发低电平事件(传感器低电平触发检测);
2、two注册一个FALLING(高变低)事件,因为默认two传感器红外被黑色线条吸收,从而不产生障碍物检测,所以检测状态为高电平;
3、checkPin为小车前方障碍物检测,如果遇到前方障碍物,小车停车并后退,这个不是重点不做详细介绍;
4、one、two、three传感器的防抖时间bouncetime,异或说检测间隔为200毫秒,这个可以自己调节,主要用于探测黑线的频率;
5、紧接着进入一个while循环,每次都检测三个传感器状态,当发现:
(1)one和three都没有触发RISING事件,我们认为此时黑线还在中间,所以直行;
(2)one和three都触发RISING事件,说明遇到横线,所以停顿;
(3)one触发,three没有触发,说明直行后黑线弯曲,触发了右侧one传感器;为了黑线居中,这个时候小车就需要右转,但是由于不知道黑线弯曲程度(后续可实验图像识别),所以小车进入一个找线环节,以0.15秒的步伐,一点点右转,同时占空比调为55,赫兹设置为45,降低右转速度;当two传感器触发FALLING事件,说明小车归正,则继续触发直行策略,以此类推;
(4)one没有触发,three触发,说明直行后黑线向左弯曲,触发左转动作,具体细节同右转相似;
6、如此,小车便会直行、停顿、左转和右转;当然程序还有很多不足的地方,后续还会继续优化。
#事件检测(边沿检测)部分可参考文章:https://www.shumeijiang.com/2020/03/15/gpio之event_detected系列函数/