OpenCV是一个基于Apache2.0许可(开源)发行的跨平台计算机视觉和机器学习软件库,可以运行在Linux、Windows、Android和Mac OS操作系统上,包含树莓派基于Linux为内核的Debian系统。它轻量级而且高效——由一系列 C 函数和少量 C++ 类构成,同时提供了Python、Ruby、MATLAB等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法。
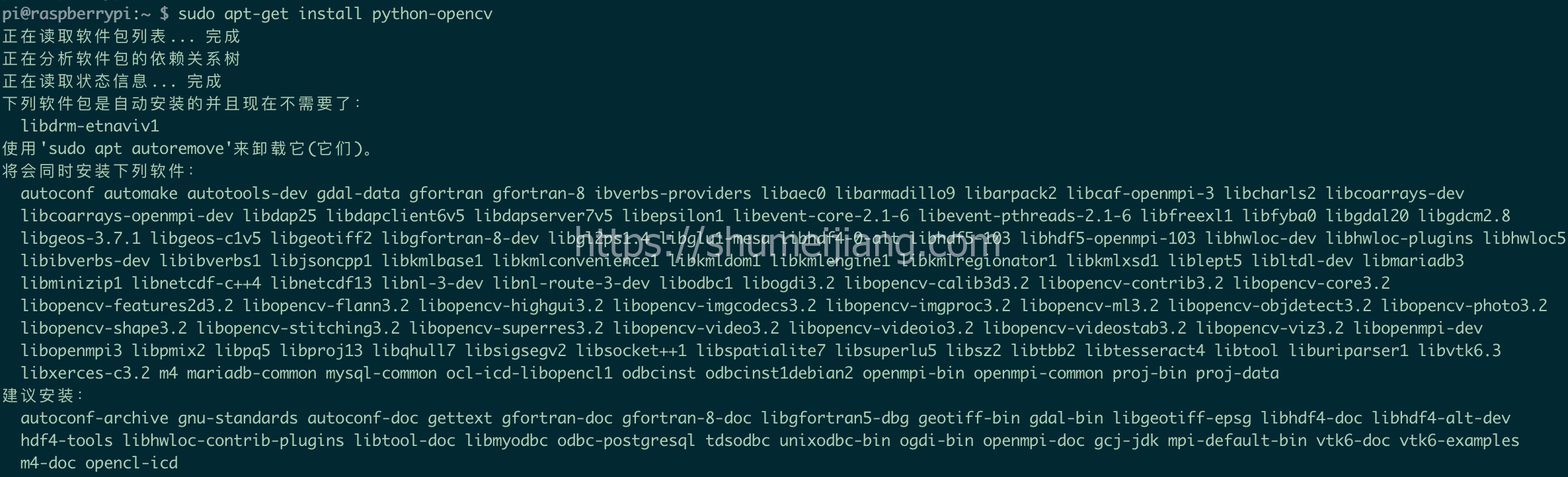
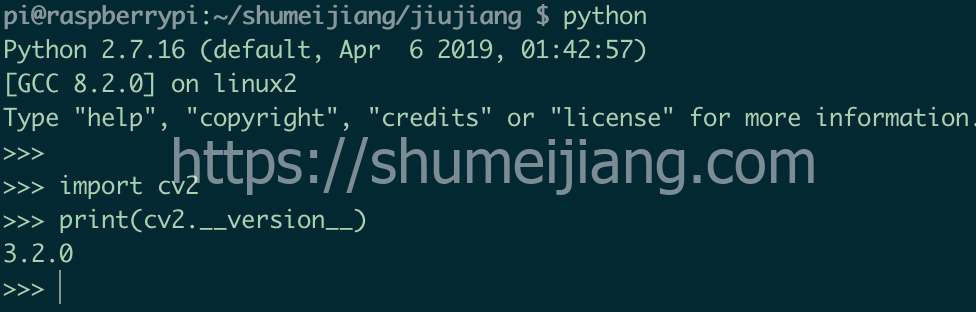
其中OpenCV-Python是用于OpenCV的Python API,它是解决计算机视觉问题的Python专用库;接下来就尝试如何安装这个库。
#下载后安装,安装成功后打开软件,然后右键选择 New connection,出现新加配置页面,其中VNC server添加我们配置好的树莓派静态IP地址;Name填写我们容易区分的别名即可;然后点击OK;
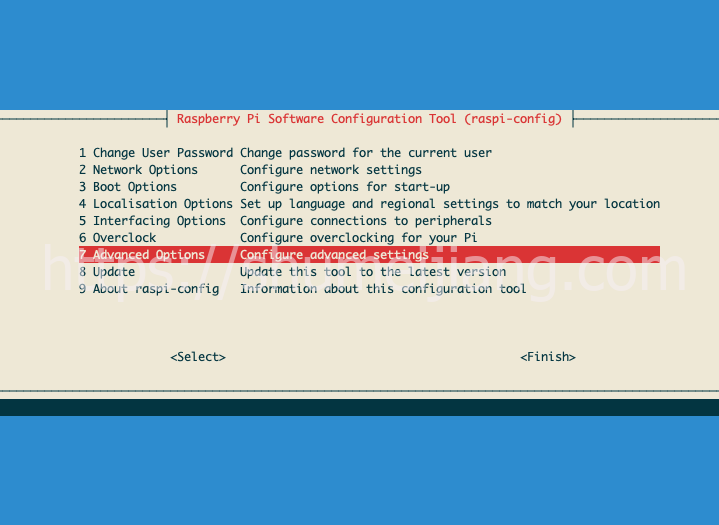
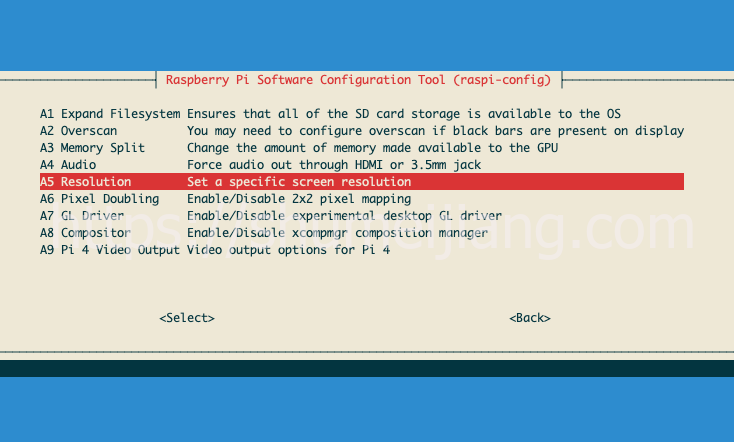
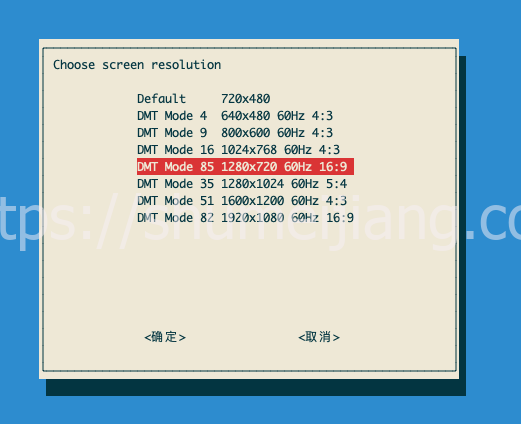
双击安装后的图标,如果出现报错 “cannot currently show the desktop”,可能意味着默认分辨率需要调整,当前VNC不支持默认分辨率;可如下修改:
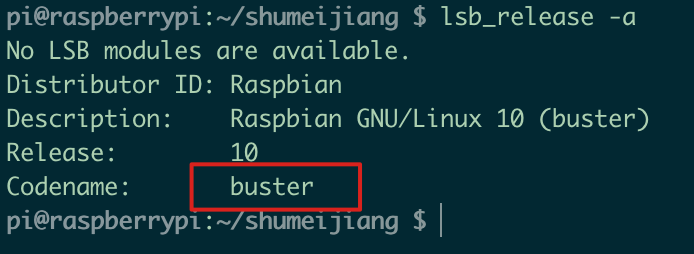
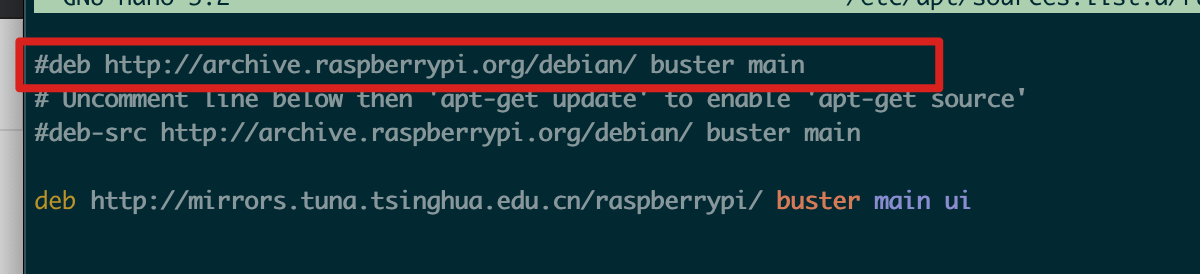
deb http://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ buster main non-free contrib rpi
deb-src http://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ buster main non-free contrib rpi