#实验目的:实验采用树莓派+PCA9685驱动板+MG995舵机组合而成;同时封装一个驱动类,通过命令行接收输入的度数从而让舵机转到到指定位置。
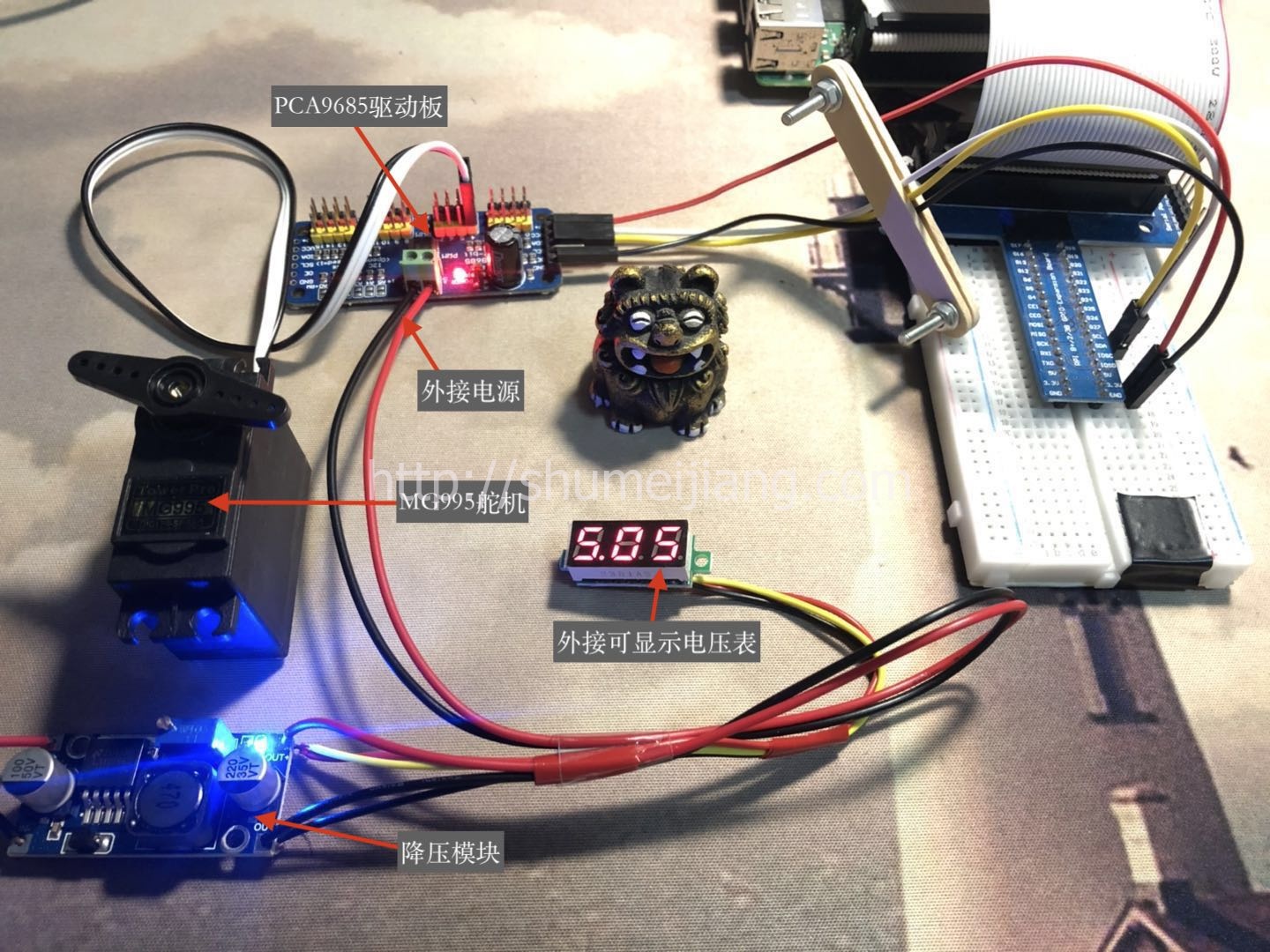
#接线效果如图:
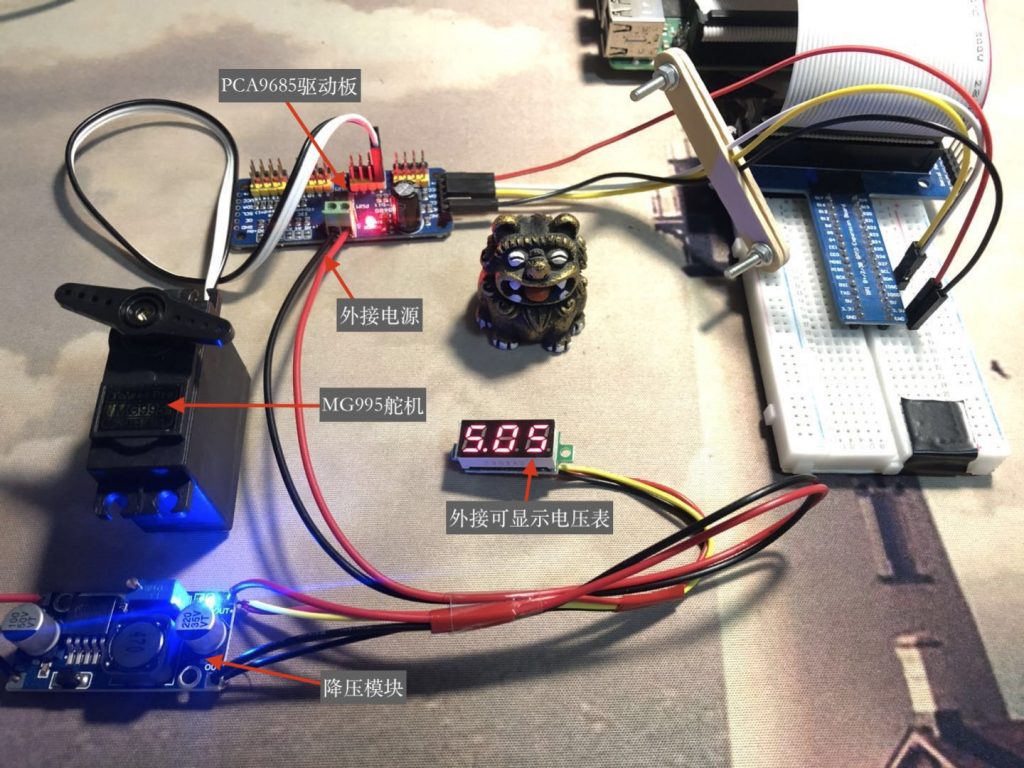 接线示例
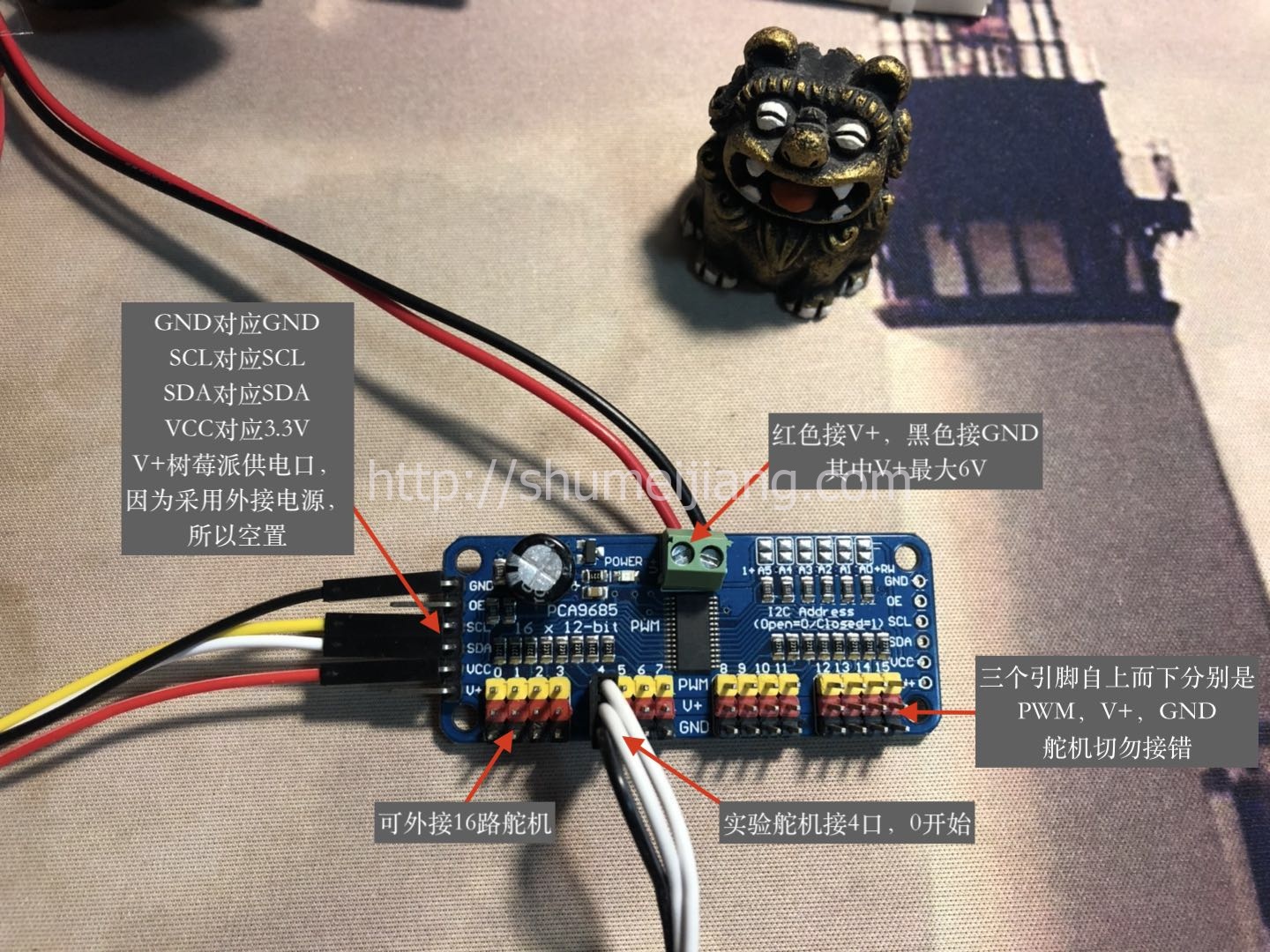
接线示例#其中驱动板接线示例:
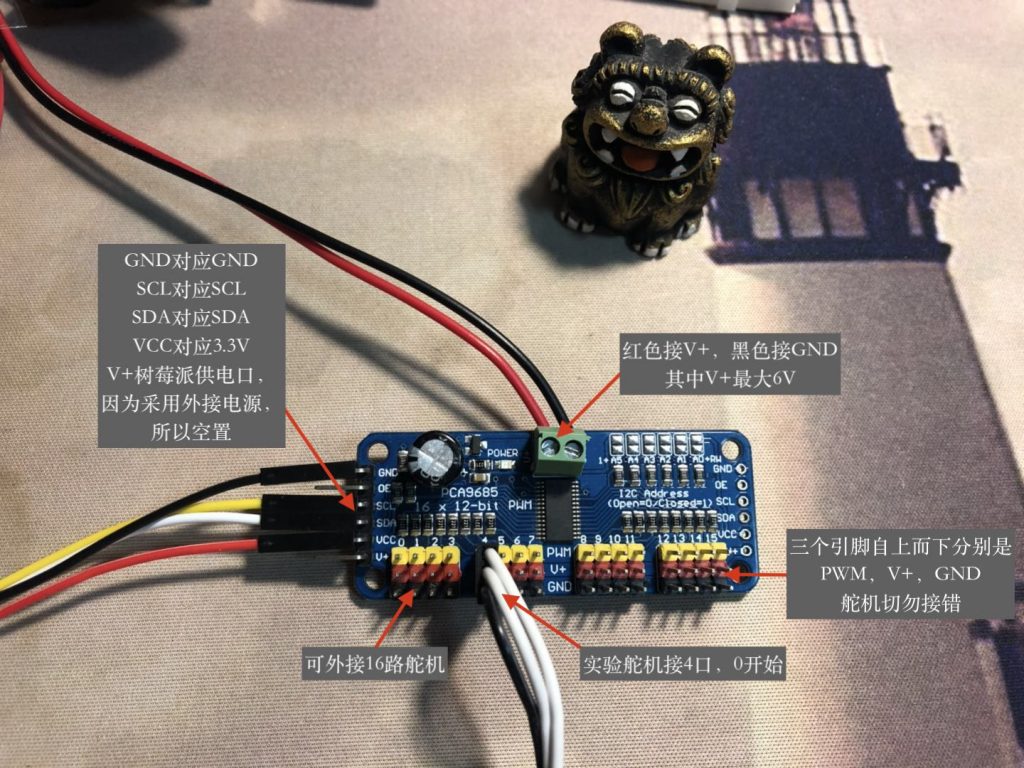 PCA9685
PCA9685#注:舵机型号不限,只要可外接PCA9685驱动板即可。
#实验代码:
 代码示例
代码示例
#!/usr/bin/env python
#coding:utf-8
'''
from JiuJiang
树莓酱的操作实例
http:://www.shumeijiang.com
'''
from PCA9685 import PCA9685 ##引入驱动类
import time ##引入time库
pwm = PCA9685() ##实例化
pwm.setsq(50) ##设置输出频率50HZ
pwm.init() ##初始化
pwm.setpwm(0, 0, 4000)
angle = input("angle is:") ##接收用户指令
pwm.setangle(4, angle) ##驱动第四个口的舵机执行命令
#pwm.setallangle(50) ##驱动所有舵机执行命令
#实验效果:
1、执行代码 Python jiujiang.py;
2、可见屏幕输入需要指定度数,输入指定的度数然后回车执行;
3、可见舵机快速转动到指定的位置。
#视频效果如下: